What is it?
The Bracke P22.b planter is a newly developed planting machine suitable for planting in flat areas as well as sloping terrain. It is a fully mechanized planter that can perform all of the planting steps, working in previously subsoiled areas, in order to establish the new forest. The P22.b is a robust machine that allows working in afforestation areas as well as in reforestation.

How does it function?
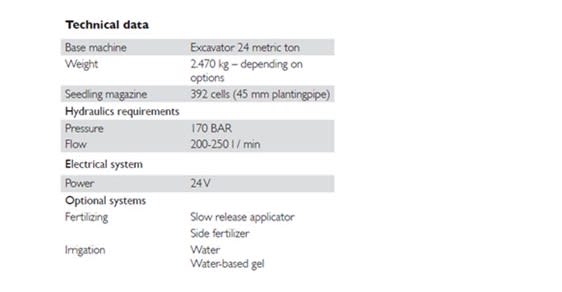
Bracke P22.b is mounted at the crane tip of an excavator or other type of base unit. It has a rotator that allows for planting in the subsoiled row or between the rows. The seedling is placed in the soil and then fixed with a gentle compressing foot. If the P22 is equipped with fertilizer and irrigation options, the granulated fertilizer is applied during planting, and the irrigation takes place directly after. Irrigation and fertilizer systems can be optionally equipped on the Bracke P22.b head. Irrigation is achieved with water, or a water-based gel applied to the soil around the seedling during planting. Fertilizing can be done in different ways, depending on the chosen option. Either by granulated fertilizer applied in two holes beside the seedling, or by a slow-release granulated fertilizer applied in the same hole as the seedling.
How it is configured?
The P22 uses a rotator & double link to position the planters in the correct location for planting and ensure that both planters have contact with the ground. The double link allows the planters to follow the contour of the ground with no need for positioning input from the operator. Each plant magazine holds 196 seedlings for a total of 392 seedlings. It can handle various types of seedlings and can be refilled quickly with the quick-refill boxes. The spacing between the planters is fixed but can be changed by adding or removing spacers between the planter units. Since the spacing is fixed, the spacing between the plants is always the same, improving the quality of the forest, and facilitating the use of machines for forest maintenance.
Control system
All functions are controlled from the operator’s cabin using buttons on the joystick and the control system. The operator receives information such as hydraulic pressure, the number of seedlings remaining, irrigation, etc. via the display in the cab. Planting depth, compaction, and other variables are easily adjusted via the display. The control system stores operating data like the number of seedlings planted, working hours and production per hour.